摘要:运用认知语言学中的空间参照框架理论和图形一背景关系理论探讨空间关系及其语言表达,具有十分重要的意义。空间关系是人对客观事物在空间中的方位、存现或运动状态的能动认知的结果。在空间关系所涉及的三要素中,目的物和参照物是基本的,是人观察和认识的基础,而人则是赋予事物以空间关系的关键。空同关系并不是存在于客观世界的自然之物,而是人类的能动识解使然。人们在识解事物之间的空间关系时,总是以一事物为参照来确定另一事物的空间方位。不同的识解方式和参照点形成了三类空间参照框架:相对参照框架,内在参照框架和绝对参照框架。人们在运用语言表达空间关系时,总是把目的物看做图形,把参照物看做背景,并以后者为参照来确定前者的空间位置。看做图形的目的物具有未知性和凸显性,看做背景的参照物具有已知性和确定性。
关键词:空间;空间关系;语言表达;空间参照框架;图形一背景关系;认知语言学
中图分类号:H030
文献标识码:A
文章编号:1000-5242(2008)01-0001-08
收稿日期:2007-08-10
基金项目:教育部人文社会科学研究基金项目“英汉语存现构式认知对比研究”的阶段性成果(06JA740019)
作者简介:张克定(1957-),男,河南大学外国语言学及应用语言学研究所教授,博士生导师。
空间(space)和时间(time)历来都是哲学、物理学、心理学等学科所关注与研究的对象。自从认知语言学于20世纪70年代末80年代初诞生以来,空间和时间也引起了众多认知语言学家的兴趣,并已成为认知语言学研究的热点之一。认知语言学对空间和时间的研究主要在于探讨人是如何通过认知识解空间和时间的,空间/时间与语言之间有着什么样的关系,人是如何运用语言来表达空间和时间的,人又是如何运用语言来表达事物之间的空间关系和时间关系的,等等。本文将运用Levinson的空间参照框架(spatial frames of reference)理论和Talmy的图形一背景关系(Figure-Ground relations)理论,试对空间关系(spatial relations)及其语言表达(hn—guistic expressions)作出认知语言学阐释。因篇幅所限,时间关系及其语言表达将另文探讨。
一、空间与空间关系
(一)空间
在哲学上,空间与时间一起构成运动着的物质存在的两种基本形式。空间指物质存在的广延性;时间指物质运动过程的持续性和顺序性。空间和时间具有客观性,同运动着的物质不可分割。没有脱离物质运动的空间和时间,也没有不在空间和时间中运动的物质。空间和时间也是互相联系的……空间和时间是无限和有限的统一。就宇宙而言,空间无边无际,时间元始无终;而对各个具体事物来说,则是有限的。空间知觉和时间知觉在人类早期就已形成。人们在改造客观世界的过程中,必然要感知到各种物质客体的大小、形状、场所、方向、距离、排列次序等等,也感知到各种事件发生的先后、迟速、久暂等等,离开空间和时间的知觉就不可能感知物质客体及其运动,无从进行任何有目的的活动。但是人类早期的时空知觉是与对物体及其运动的知觉纠葛在一起的。随着抽象思维能力的提高,人们才逐步形成空间和时间的观念。形成标志这两种观念的概念或范畴,并发展到对空间和时间的特性作独立的考察,形成种种关于空间和时间的理论和学说。时空观的历史发展表征着人类对空间时间认识的逐步深化。
一切事物都存在在时空中。在社会实践中,只要我们谈论事物的存在,就不可避免地要涉及时间和空间。因此,“在时空中”就“把存在和时间、空间、具体性统一到一起,讲到存在必定有时空,也就是有限定的、有边界的。时空中的存在是可知的、可认识的,是科学知识的对象,原则上可以用科学的方式去认知和把握”。
心理学研究表明,人对客观事物的认识是从感觉(sensation)开始的,人首先通过感觉来反映作用于其感觉器官的客观事物的个别属性和其所处的某种活动状态的信息。在实际生活中,任何客观事物的属性并不是脱离具体事物而独立存在的,因此,人在对事物的个别属性进行反映时,总是把其个别属性作为事物的一个方面而与整个事物同时来反映的。这种对客观事物进行信息整合而形成客观事物的整体影像就是知觉(perception)。感觉和知觉都是人的大脑对直接作用于人的感官的客观事物的反映,但感觉是对物体个别属性的反映,而知觉是对物体整体的反映。所以,感觉是知觉的基础,知觉以感觉为前提,并与感觉一起进行而产生。但知觉不是把感觉简单的相加,知觉的产生还要借助于经验和知识的帮助,因此,知觉是经验参与其问的纯粹的心理活动。人的空间知觉(space perception)也是以感觉为基础的,是对自身所在空间与自身周围空间中各种事物之间关系综合了解的心理过程。人是生活在三维空间内的,在一切活动中,人必须随时随地对远近、高低、方向等作出适当的判断。
空间有自然空间和社会空间之分。自然空间是科学和哲学意义上的空间。作为一种客观实在,空间没有始终,没有边际,没有主体,也没有价值,永恒地存在着,不以人的意志为转移。社会空间即一般所谓的生存空间,是建立在人类对客观世界感知的基础上的,是一种特定条件下的空间,是人类主体产生和发展过程中固有的本质形式,具有超自然性。空间的价值在于其社会性,而社会化的空间与人类的生活息息相关。依据生理学和心理学的观点,空间的社会性无疑导源于人类的感知能力。因此,可以认为,社会空间“是通过人的社会实践活动在社会运动中获得现实性的。没有实践活动这种社会运动形式,也就没有社会空间的存在形式”。可见,社会空间是“有开端的,也是有终结的。而自然空间作为运动着的物质的存在形式是无开端的”。这就说明,社会空间必然涉及人的能动参与,社会空间是人类在观察、认识客观世界的过程中对事物的属性及其事物之间的相互关系的概念化(conceptualiza-tion)和范畴化(categorization)的结果。由此可以认为,“空间是人类认知系统和语言系统中的一个基本概念,因为每个人都必须有意识或无意识地意识到自身的空间方位”。人对空间的观察、认识和感知通常体现出以下3个特点:1.人类的空间思维本质上总是相对的(relative),而非绝对的(abso-lute);2.人类的空间思维从根本上讲是以自我为中心的(egocentric);3.人类的空间思维带有明显的人的属性(anthropomorphic)。空间坐标系(spatialcoordinates)的建立是以人自身为参照的,从而形成了左右、前后、上下等空间概念。本文以下所说的空间即指社会空间,简称为空间。
空间是相对的。当谈论一个物体的空间位置时,人们总是指该物体与另一个或另一些物体的相对位置。如果没有其他物体,就无法确定该物体的空间位置。当谈论一个物体在某一空间中移动时,人们是指该物体与其他物体的相对位置发生了变化。当谈论一个物体的存在时,人们也总是指该物体存在于其他物体所体现出的空间范围之中。这就是说,无论是谈论一个物体的位置、移动或存在,都必须以另一个物体为参照,即一个物体在空间中的位置、移动或存在状态都是相对于另一个物体而言的。否则,就无从谈论任何物体的位置、移动或存在。
(二)空间关系
所谓空间关系,是两个或多个客观事物在空间中所显现的关系,而这种空间关系离不开人对客观事物的观察和认识,因此,空间关系是人对客观事物在空间中的方位、存现或运动状态的能动认知的结果。空间关系通常由3个要素构成:事物
1(记作O
1)、事物
2(记作O
2)和O
1与O
2之间的空间关系的观察者(viewer)——人,即对客观事物进行观察并将其概念化者(conceptualizer,记作C),如下图1所示:
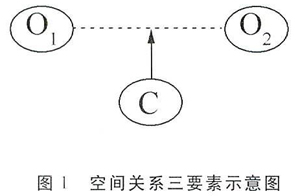
图1表明了空间关系三要素之间的关系,其中,虚线表示O
1和O
2之间的某种空间关系,实线箭头表示C对O
1和O
2之间的空间关系的识解。需要说明的是,O
1和O
2虽然是客观存在的,但二者之间的空间关系需要C对其识解,而且C的识解又带有一定的主观性,因为人类对客观世界的认识本身就是主观的。例如,若O
1为一座房屋,O
2为一座教堂,二者相邻且处在一条线上,那么,当C观察和识解两者的空间关系时,既可以将其识解为相邻关系,也可以将其识解为方位关系,分别如(1a)-(1b)和(2a)-(2b)。
(1a)The house is near the church.
(1b)The church is near the house.
(2a)The house is on the right Of the church.
(2b)The church is on the left of the house.
C对O
1和O
2之间空间关系识解的主观性由此可见一斑。这就充分说明,事物是客观存在的,但事物之间的空间关系(包括其他关系)则是人通过观察、感知、识解而赋予事物的。因此,在空间关系三要素中,事物是基本的,是人观察和认识的基础,而人则是赋予事物以空间关系的关键,因为离开了人的能动认知,事物则仅仅是存在而已。
王寅在探讨语言的体验性时指出,“体验哲学和认知语言学关于语言的体验观,其要点是:概念和意义基于感知体验,而感知体验又是基于人的身体构造(包括具有丰富想象力的大脑),因而人类能用特殊的、一贯的方法来感知客体、他人、空间,以及其间的种种关系”。Lakoff和Johnson认为:“空间关系概念(spatial-relations concepts)是人类概念系统中的核心概念,可以说明空间对人类具有什么样的重要意义。空间关系概念可以勾画出空间形式(spatial form)的特点,并可确定空间推理(spatial inference)。然而,空间概念并不像客观事物那样存在于客观世界之中,人们也不能像看见具体事物那样看见空间关系。譬如,人们并不能看见‘远近’(nearness and farness)的概念,而只能看见事物位于何处,只是以某一事物为界标(landmark)把‘远近’的属性特征赋予事物。”因此,空间关系并不是存在于客观世界的自然之物,而是人类的主观识解使然。这可以看作是古希腊哲学家普罗塔哥拉(Protagoras)的著名命题“人是万物的尺度”(Man is the measure of all things.)的一个明证。
二、空间参照框架
人类主观识解的空间关系有其自身的内在结构,包括两个或两个以上的事物。人们在确定这两个事物的空间关系时,要以其中的一个事物为参照来确定另一事物的空间位置,因为人们“在指出某一东西或处所的位置时经常要有个定方位的参考点”。那么,用作参照的事物可以叫做参照物(reference object,O
k),根据参照物确定下来的事物则可叫做目的物(10cated object,O
L)。这样,空间关系中的目的物与参照物之间就形成了空间参照框架(spatial frames of reference)。空间参照框架实际上是一种有界空间域(a bounded region in space)。在讨论空间参照框架时,Levinson对前人的有关研究进行了概括和归纳,并将其总结为以下5种二元对立的分类:1.相对空间与绝对空间(relative vs.absolute space)参照框架。2.以自我为中心的与以他人为中心的(egocentric vs.allo-centric)参照框架。3.以观察者为中心的与以物体为中心的(viewer-centred vs.object-centred)参照框架。4.受方向约束的与不受方向约束的(orien-tation-bound vs.orientation-free)参照框架。5.指示性与内在性(deictic vs.intrinsic)参照框架。但是,他并不完全赞同这种二元对立的分类方法。根据Carlson-Radvansky和Irwin的以观察者为中心的参照框架、以物体为中心的参照框架和以环境为中心的(environment centred)参照框架的三分法,Levinson从认知的角度提出了相对参照框架(relative frame of reference)、内在参照框架(intrinsic frame of reference)和绝对参照框架(absolute frame of reference)的分类,并进行了细致分析和深入探讨。相对参照框架涉及3个要素,即观察者(V)、目的物(O
L)和参照物(O
R)。这是从观察者的视角出发来识解和O
L,O
R之间的空间关系的。例如:
(3)The ball is in front of the tree.
(4)The ball is to the left of the tree.
这两例涉及的O
L为the bali,O
R为the tree,虽然V是隐含的,但V的作用不可忽视,因为the ball和the tree的空间关系是以V的观察视角来确定的,即the ball到底是在the tree的前面或左边是由V的观察视角决定的,因为“前/后”、“左/右”不是the tree的本质特征(inherent features)。
内在参照框架涉及O
L和O
R两个要素。这是根据O
R的“前/后”、“上/下”、“内/外”等本质特征来识解O
L和O
R之间的空间关系的。例如:
(5)The statue is in front of the town hall.
(6)The statue is behind the town hall.
例(5)和(6)中的O
L和O
R均为the statue和the town hall,两者的空间关系分别是以the townhall的本质特征“前”和“后”来确定的。而不以V的观察视角为转移。
绝对参照框架也只涉及O
L和O
R两个要素。这是以空间的基本方向(cardinal directions),如“东/西/南/北”,为基准来判断O
L和O
R之间的空间关系的。例如:
(7)Zhengzhou is west of Kaifeng.
(8)Kaifeng is east of Zhengzhou.
这两例都是以空间的基本方向为基准来判断郑州和开封的空间关系的。在例(7)中,郑州的空间方位按照空间的基本方向、以开封为参照而得到确定,而在例(8)中,开封的空间方位则是按照空间的基本方向、以郑州为参照而得到确定。但二者都不以V的观察视角为转移。
Dodge和Lakoff与Levinson持相同的观点。他们认为,在内在参照框架中,空间坐标系是用界标物(landmark object)(即参照物)的本质特征来确定的。譬如,He ran into the room这一构式就使用了the room的内在意象图式结构特征(inherent im-age schematic structure)来确定移动者he运动后的空间位置。在相对参照框架中,空间坐标系是从某一特殊视角(particular viewpoint)来确定的。这种参照框架虽然涉及界标物和图式结构的使用,但并不涉及界标物的内在图式结构特征。He ran in front of the tree这一构式就没有使用界标物the tree的内在图式结构特征,而是使用了V的身体图式特征,即其“前后”特征,来确定移动者he的空间移动状态。因此,在这种参照框架中,虽然界标物也处于在场(present)状态,但V的视角才是这种空间参照框架中的空间坐标定位(anchor)的关键。绝对参照框架并不以界标物或V为参照对象,而是以绝对坐标系(absolute coordinates)为参照对象来确定事物间的空间关系。总之,在这几类空间参照框架中,界标物、观察者V和环境(environment)都可用来对事物的空间方位实施定位。他们同时指出,在绝大部分语言中,空间参照框架都是语法化(gram-maticalization)和词汇化(lexicalization)的结果。
黄衍也指出,按照完形心理学(Gestalt psycho-logy)的观点,参照框架实际上是空间坐标系统(co-ordinate systems),用来依据一事物确定另一事物的空间位置。他认为,Levinson所提出的相对参照框架、内在参照框架和绝对参照框架分别属于以自我为中心、以物为中心和以绝对坐标为中心的坐标系。以自我为中心的坐标系表达的是V、O
L和O
R三者之间的空间关系,且O
L和O
R与V泾渭分明,该坐标系从V的视角来判断O
L和O
R之间的空间方位,如下例(9)。以物为中心的坐标系是以O
R的本质特征来确定O
L的空间位置,与V的观察视角无关,如下例(10)。以绝对坐标为中心的坐标系不同于前两种坐标系,既不以V为中心,也不以O
R的本质特征为参照,而是以东/西/南/北这样的绝对坐标来确定O
L和O
R的空间关系,也与V的观察视角无关,如下例(11)。
(9)The dog is to the left of the car.
(10)The dog is behind the car.
(11)The dog is(to the)east of the car.
由以上可知,在相对参照框架中,O
L和O
R的空间关系以V为中心而得以识解。而内在参照框架和绝对参照框架虽然也离不开V的参与。但O
L和O
R的空间关系与V的位置(location)和视角无关。在内在参照框架中,O
L和O
R的空间关系以O
R自身的本质特征来识解;在绝对参照框架中,O
L和O
R的空间关系则以空间的基本方向,即绝对坐标而得以识解。
Levinson等学者所提出的每一种空间参照框架都包含着三个必不可少的重要因素,即目的物O
L,参照物O
R和观察者V,其中,V为识解O
L和O
R之间空间关系的认知主体,O
L和O
R是认知主体识解其空间关系的基础,O
L是认知主体识解其空间方位的对象,O
R为认知主体识解O
L之空间方位的衬托。由此可知,在这三个要素中,V是识解O
L和O
R之间空间关系的关键,O
L和O
R是构成一定空间关系和V对此关系进行能动认知和识解的基础,三者缺一不可。所以,无论是相对参照框架,还是内在参照框架,还是绝对参照框架,无论是以自我为中心,还是以物为中心,还是以绝对坐标为中心,V都是识
解事物空间关系的至为重要的关键因素。这是因为,V的观察视角、物体的本质属性和绝对坐标系都是人观察、认识客观世界和客观事物及其关系并进而概念化的结果。
三、空间关系的语言表达
客观事物之间的空间关系,依据两者之间所具有的空间性质,大体上可以区分为空间方位关系(spanal relations of location),空间移动关系(spa-tim relations of motion)和空间存现关系(spanal re-lations of existence or presentation)。这些空间关系既可以是静态的,也可以是动态的。空间方位关系属于静态空间关系。在这种空间关系中,O
L的空间位置以O
R为参照而得以确定。在例(12)中,Ja-pan的空间方位是以绝对坐标为基准、以China为参照而确定的。在例(13)中,yOur cup的空间位置是依据the table的内在本质特征,并以其为参照而得以识解的。空间移动关系属于动态空间关系。这种空间关系说明的是O
L以O
R为参照而运动的情况。在例(14)中,the kids的空间运动情况是从V的观察视角出发,以the station为参照来识解的。而在例(15)中,she的空间运动情况则是按照herroom的内在本质特征,并以其为参照来识解的。
(12)Japan is to the east of China.
(13)Your cup is on the table.
(14)The kids ran all the way to the station.
(15)She went out of her room.
空间存现关系可分为空间存在关系和空间隐现关系。前者属于静态空间关系,后者属于动态空间关系。空间存在关系表明O
L存在于O
R这一参照物的空间范围之内。在例(16)中,a bike的空间存在位置是从V的观察视角出发,以the house为参照而得以识解的;而在例(17)中,many people的空间存在位置则是依据the lecture hall的内在本质特征来识解的。空间隐现关系表明O
L在O
R这一参照物的空间范围中的出现或消逝情况。例(18)是依据the room的内在本质特征来说明a group of in-spectors呈现于the room这一空间范围之中;而例(19)则是以the horizon为参照来说明our own ship从the horizon这一空间范围消逝的情况。
(16)There is a bike near the house.
(17)There are many people in the lecture hall.
(18)There came into the room a group of in-spectors.
(19)One by one during the day the vesselsleft until finally there disappeared our own ship over the horizon.
由以上各例可以看出,人们在运用语言表达事物之间的空间关系时,一般都要采用词汇手段和语法手段相结合的方法。词汇手段如以上例子中具有空间意义的介词to,on,near,into,over等,语法手段如例(12)-(19)这样的各类构式。然而,空间关系的语言表达方式绝不仅仅局限于上述几种,而是呈现出多样化的趋势,因为在实际的言语交际过程中,人们往往要根据其交际目的和语用意图来组织和安排所要传递的信息。所以,即使是同一个空间关系,也可以用不同的语言构式来进行表达。例如:
(20a)Many exquisite pain-tings were in herroom.
(20b)In her room were many exquisite pain-tings.
(20c)There were many exquisite paintings inher room.
(20d)In her room there were many exquisitepaintings.
例(20a)-(20d)表达的虽然都是目的物manyexquisite paintings和参照物her room之间的空间关系,但例(20a)-(20b)表达的是两者的空间方位关系,而例(20c)-(20d)表达的则是两者的空间存在关系。此外,在例(20a)-(20b)中,前者使用了无标记(unmarked)构式,后者使用了有标记(marked)的倒装构式,两者分别以O
L和O
R为话题(topic)来进行信息编排。例(20c)和(20d)均为存在构式,两者的不同在于,后者以O
R为话题来进行信息编排,而前者不是。这就表明,空间关系的语言表达方式可以是多种多样的。
四、空间语言表达的认知阐释
完形心理学曾通过实验提出了知觉组织法则(law of perceptual organization),即完形组织法则(Gestalt laws of organization)。该法则说明知觉主体是按怎样的形式把经验材料组织成有意义的整体。完形心理学家认为,主要有5种完形组织法则,其中之一为图形背景(figure-ground)法则。图形一背景法则认为,在一个具有一定配置的场(field)内,有些对象突出出来形成易于被感知的图形,而其他对象则退居次要地位成为背景。完形心理学家鲁宾(E.Rubin)认为,“就其特征而言,图形有赖于背景,图形出现在背景之上。背景起着一种框架的作用,由于图形悬浮于其中,因此框架决定了图形”。因此,“在一般情境之下,图形圆与背景是主副关系,图形是主题,背景是衬托。”而且“图形必须有背景的衬托始能显现”。这就是说,图形与背景是相对而言的。图形具有鲜明、完整的形象,更易于被感知,而且比背景突出。
Talmy将完形心理学中的图形一背景概念引入认知语言学,并从认知的角度对其进行了深入研究。他认为,图形和背景具有不同的本质特征(defini-tional charaeteristics)和联想特征(associated cha-racteristics)。图形具有未知的、需要确定的时空特征,而背景则具有可以标明图形之未知性的已知特
征;图形的联想特征包括可动、较小、较简单、较晚进入场景或意识、受到较多关注、凸显性强、依赖性强等,而背景则具有较固定、较大、较复杂、较熟悉、受到较少关注、背景性强、独立性强等联想特征。他还指出,图形是一个有待定位(ancboring)的概念,背景则是实施定位的概念。这对概念可以充分解释某一移动或方位事件(event of motion or location)中两个相关物体的空间关系。自然语言可以表达所有空间关系,即自然语言可以运用一个物体与另一个相关物体的相对位置的方法来表达空间关系。由此可以认为,Talmy的图形一背景关系理论对自然语言如何表达空间关系具有很强的解释力。
根据Talmy列图形和背景概念的解释和这两个概念的本质特征和联想特征,空间关系中的O
L可以看做图形,O
R可以看做背景。例如:
(21)Sam i8 in the house.
(22)Jay is between Kate and Lisa.
这两例表达的都是空间方位关系。在例(21)中,the house为背景,Sam为图形,后者的空间位置以前者为参照而得以确定。由于介词in所具有的空间性质,此例说明后者处于in和the house所构成的有界空间域内。在例(22)中,Kate和Lisa一起构成背景,Jay为图形,Jay的空间位置以Kate和Lisa为参照而得以确定。根据between的空间性质,例(22)说明Jay在Kate和Lisa之间。
正如上文所说,空间移动关系是一种动态空间关系。这种空间关系中的空间参照框架为起点一路径一终点(source-path-goal)框架,说明的是某一O
L从起点开始,沿着或经过某一路径移动到终点的动态运动过程。例如:
(23)The apple fell from the tree into thegrass.
在此例中,the apple为图形,从the apple在树上的位置到草丛为空间参照框架。此例描写了图形the apple从其在树冠中的位置(即起点)开始下落,经过树冠到地面这一路径,落入草丛这一终点的移动过程,如图2和图3所示。
在空间存现关系中,存在物或呈现/消逝物为图形,空间参照框架中的O
R为背景,说明的是O
L存在或呈现于某一空间范围,或者是O
L从某一空间范围中消逝。上例(16)-(17)描写的都是空间存在关系。例(16)中的O
1为a bike,O
R为the house,前者为图形,后者为背景,说明前者存在于后者的旁边。在例(17)中,many people这一O
L为图形,the lec-ture hall这一O
R为背景,说明前者存在于后者这一空间范围之中。上例(18)-(19)描写的是空间呈现关系,例(18)中的O
L为a group of inspectors,O
R为the room,前者为图形,后者为背景,说明前者出现于后者这一空间范围之中。在例(19)中,our ownship这一O
L为图形,the horizon这一O
R为背景,说明的是前者从后者这一参照物的空间范围中消逝。
由以上实例分析可知,人们在运用语言表达事物的空间关系时,总是要把符合背景的本质特征和联想特征的事物看做O
R,把符合图形的本质特征和联想特征的事物看做O
L,并以此为依据来确定事物之间的空间关系。因此,在下列各组中,a句是可以接受的表达式,而b句则是不可接受的表达式。
(24a)The book is on the table.
(24b)*The table is under the book.
(25a)The bike is near the house.
(25b)*The house is near the bike.
(26a)There is a desert in Northern Africa.
(26b)*There is Northern Africa in the de-sert.
(27a)The car ran into the garage.
(27b)*The garage ran Into the car.
当然,如果某一空间关系中的两个事物所具有的图形特征和背景特征相同,则均可看做O
L或O
R,可互为参照来确定两者之间的空间关系。因此,下列两组中的a句和b句均是可以接受的表达式。
(28a)The house is near the church.
(28b)The church 1s near the house.
(29a)The notebook is on the textbook.
(29b)The textbook is under the notebook.
这就说明,空间关系中的两个事物,如果所具有的图形特征和背景特征明显不同,则具有图形特征的物体往往被识解为O
L而具有背景特征的事物往往被识解为O
R;如果所具有的图形特征和背景特征相同,则均可被识解为O
L或O
R。因此,在后一种情况下,图形和背景是可以相互转化的,即原来被识解为O
L的物体可以被识解为O
R,原来被识解为O
R的物体也可以被识解为O
L,但这要取决于V的注意焦点。譬如,在例(28a)和(28b)中,the house和thechurch为具有相同图形特征和背景特征的两个物体,均可被识解为O
L或O
R,但是,在例(28a)中,V的注意焦点为the house,而在例(28b)中,V的注意焦点却放在了the church之上。
以上讨论在区分自然空间和社会空间的基础上,从认知的角度探讨了空间关系、空间参照框架和空间关系的语言表达,并运用图形一背景关系理论对空间语言表达方式进行了认知解释。在认知语言学中,图形一背景是认知运作和语义结构重要的和基本的特性。图形是指某一认知概念或感知中突出的部分,即注意的焦点部分,而背景则是指为突出图形而衬托的部分。图形是所要描写的对象,背景是其环境。对图形的选择取决于注意的焦点、移动的方向、观察的视角等等。因此,在上述各类空间关系的语言表达式中,看做图形的O
L是说话人要确定其空间方位的对象,也是说话人要着意强调的对象,即注意的焦点,而看做背景的OR则是说话人用以确定O
I的空间方位的衬托。因此,O
L具有未知性(newness)和凸显性(prominence),O
R具有已知性(givenness)和确定性(determinateness),说话人以后者为衬托来突出强调前者。
[责任编辑 刘剑涛]